




HIL测试柜可以模拟驾驶行为、故障输入,从而验证功能需求
实验教具

RoboKit
面向低速场景无人驾驶的开发需求,RoboKit基于异构多处理架构的嵌入式人工智能计算平台, 采用混核操作系统架构,将摄像头、激光雷达、超声波雷达等多种传感器进行高度融合,构建面向智能移动机器人的大脑, 并提供CAN总线等多种通讯接口,支持与各种移动底盘进行快速集成,为智能移动应用提供高效的开发和实验平台。
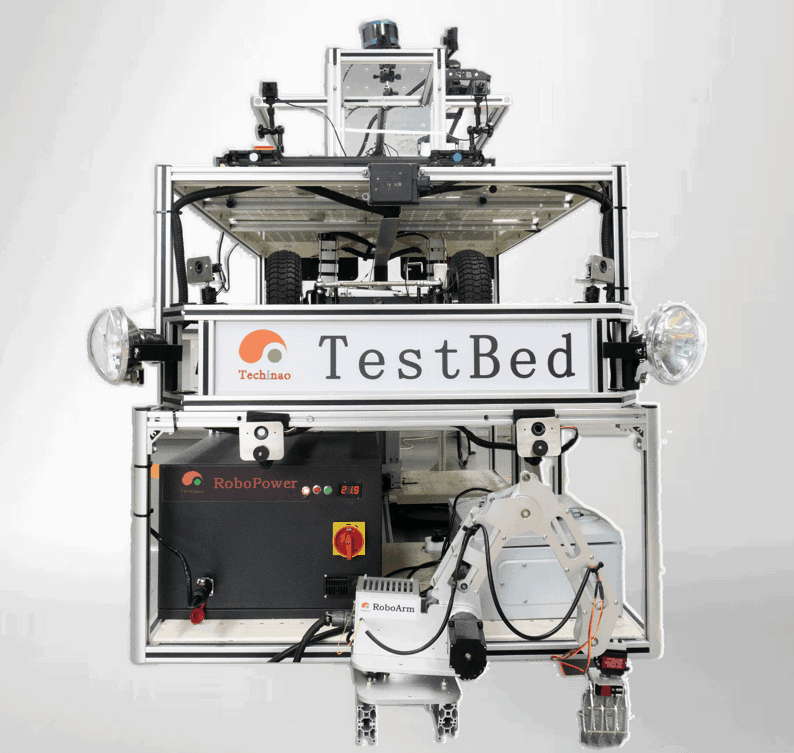
TestBed
针对不同的传感器进行比对选型、适配,并且通过选定的激光雷达、摄像头等传感器进行自动驾驶算法的验证、参数优化:
(1)将车辆各部件进行分解重构,方便对车辆结构进行展示教学;
(2)采用“TestBox”,对智能汽车各功能模块进行单独控制;
(3)借助“Smart Calibrator”可对测试床上各传感器进行标定;
(4)具备丰富的扩展平台,可以加装多种传感器、汽车电子部件、外扩机械臂和升降台架,可以模拟特种设备的自动控制;

仿真机柜
为自动驾驶算法训练提供百万亿次算力,为算法测试提供开放式场景库:
(1)内置开放式场景库,为算法训练、深度学习提供百万亿次算力;
(2)在高遍历速度和高场景密度下对算法逻辑和功能进行验证;
(3)能够还原极少出现但理论上还是会遇到的Conner case;
(4)支持模型在环(MIL)测试,验证控制算法模型是否准确地实现了功能需求;

虚拟驾驶舱
用户可使用虚拟驾驶仓进行自动驾驶算法的仿真验证,测试自动驾驶系统在不同场景下的可靠性和稳定性:
(1)通过数字孪生技术,将现实中的操控结果反映在虚拟模型上;
(2)通过运动座舱可以对碰撞、加减速进行体感模拟反馈;通过智能方向盘对转向力矩进行体感模拟反馈;
(3)可实时远程控制实车,进行远程接管操作;
(4)支持驾驶在环(DIL)测试,验证具有人工输入的汽车控制器中的嵌入式软件性能;